ESR6 - Nonlinear Identification of Bolted Joints
Recruiting Institution/Company: Middle East Technical University (Turkey)
PhD awarded by: Middle East Technical University (Turkey)
Connections and joints are one of the main parts of most engineering structures. Due to the complexities that come up with connections such as nonlinear behavior, introducing damping, and changing local stiffness of the structure, accurate modeling and identification of connections are necessary.
In this study, linear and nonlinear identification methods are developed and used to identify a bolted connection. The FRF Decoupling Method (FRF-DM), developed in our research group for dynamic characterization of bolted joints, is extended for 3D finite element models of structural systems and to consider measurements and excitation at the connection degrees of freedom, which improves the identification accuracy. For nonlinear identification, a new method is proposed based on the identification of nonlinear joint forces in the frequency domain. The proposed method, which constitutes the major contribution of this work, requires measured nonlinear response of the coupled structure and measured linear frequency response functions (FRFs) of the substructures. Instead of measurements from substructures, calculated linear FRFs of the coupled structure with estimated linear connection parameters can also be used. Finally, utilizing the identified nonlinear joint forces and the corresponding relative displacements at the connection DOFs, parameters of the nonlinear joint model are obtained. The formulation developed does not require measurements at the connection DOFs. The method can be applied by employing measurements at a single frequency with different excitation force amplitudes or by employing measurements at different frequencies, preferably around resonance frequency, by using a single excitation amplitude.
Two beams that are connected by a single bolt (Fig. 1) are considered as a case study. Beams and the bolt are modeled by using 3D solid elements and distributed 1D friction elements with normal load variation are used in the contact area.
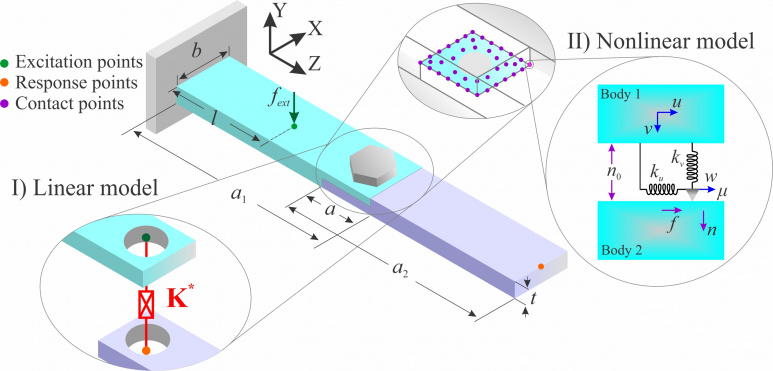
Figure 1 – Two beams connected by a bolt: joint is modelled linearly by complex stiffness matrix, and nonlinearly by friction elements distributed on the contact interface
First, the bolted joint is identified linearly. A 6 by 6 complex stiffness matrix is used to represent the whole bolt and the linear parameters are identified by using the Extended FRF Decoupling Method (E-FRF-DM). The performances of two alternative equations (case 1: connection DOFs are not used in measurements, case 2: connection DOFs are used in measurements) obtained by the E-FRF-DM are compared with each other, as well as with that of the Inverse Structural Modification Method (ISMM), developed recently in our research group for joint identification, in Fig. 2a by using noisy simulated measurements. As the results show, case (2), which includes measurements at connection DOFs, gives more accurate results.
For nonlinear identification, the nonlinear response of the system by using 470 nonlinear friction elements is used as simulated measurements. In the nonlinear model of the joint, only two nonlinear elements are considered and their parameters are identified by using the simulated response at a force level of Fig. 2b compares the regenerated responses of the system at different forcing levels. The results show the good performance of the new nonlinear identification method. It should be mentioned that the new method can be used not only for identification but also for the reduction of the number of nonlinear elements used for a joint model.
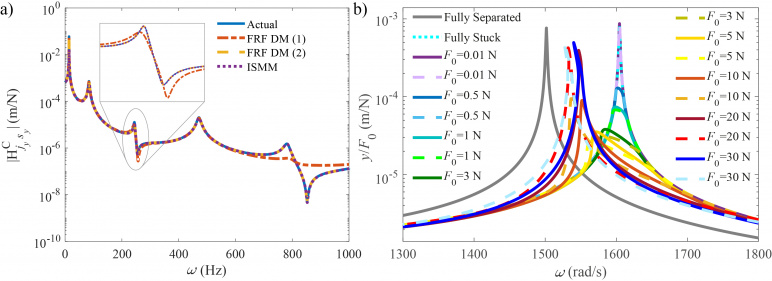
Figure 2 –Comparison of the exact and regenerated coupled system FRFs: a) Joint is linear, b) Joint is nonlinear: simulated measurements with 470 nonlinear elements -solid lines, regenerated responses by using the identified nonlinear joint model which includes only two nonlinear elements-dash lines, for several different forcing levels
The results show that the E-FRF-DM improves the accuracy of the identification in linear modelling. However, linear identification may not predict the response of the system accurately at higher levels of vibration; hence, a nonlinear joint model becomes unavoidable. The identification method developed for this purpose proves to be a good solution for such cases. This method allows predicting the nonlinear response of the system at any forcing level by using a model with as little as two nonlinear elements, and by using measurements at a lower forcing level as well as at only one high forcing level which excites the system in the nonlinear regime.